
Page 52 - FGDP revista FEGLININ
P. 52
© FEGLININ ISSN 2594-2298
| Año 7, No 28, enero – marzo 2024 |
2.2. Mapas de cambio continuo
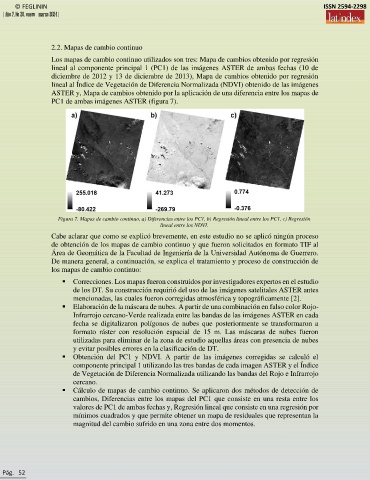
Los mapas de cambio continuo utilizados son tres: Mapa de cambios obtenido por regresión
lineal al componente principal 1 (PC1) de las imágenes ASTER de ambas fechas (10 de
diciembre de 2012 y 13 de diciembre de 2013), Mapa de cambios obtenido por regresión
lineal al Índice de Vegetación de Diferencia Normalizada (NDVI) obtenido de las imágenes
ASTER y, Mapa de cambios obtenido por la aplicación de una diferencia entre los mapas de
PC1 de ambas imágenes ASTER (figura 7).
Figura 7. Mapas de cambio continuo, a) Diferencias entre los PC1, b) Regresión lineal entre los PC1, c) Regresión
lineal entre los NDVI.
Cabe aclarar que como se explicó brevemente, en este estudio no se aplicó ningún proceso
de obtención de los mapas de cambio continuo y que fueron solicitados en formato TIF al
Área de Geomática de la Facultad de Ingeniería de la Universidad Autónoma de Guerrero.
De manera general, a continuación, se explica el tratamiento y proceso de construcción de
los mapas de cambio continuo:
▪ Correcciones. Los mapas fueron construidos por investigadores expertos en el estudio
de los DT. Su construcción requirió del uso de las imágenes satelitales ASTER antes
mencionadas, las cuales fueron corregidas atmosférica y topográficamente [2].
▪ Elaboración de la máscara de nubes. A partir de una combinación en falso color Rojo-
Infrarrojo cercano-Verde realizada entre las bandas de las imágenes ASTER en cada
fecha se digitalizaron polígonos de nubes que posteriormente se transformaron a
formato ráster con resolución espacial de 15 m. Las máscaras de nubes fueron
utilizadas para eliminar de la zona de estudio aquellas áreas con presencia de nubes
y evitar posibles errores en la clasificación de DT.
▪ Obtención del PC1 y NDVI. A partir de las imágenes corregidas se calculó el
componente principal 1 utilizando las tres bandas de cada imagen ASTER y el Índice
de Vegetación de Diferencia Normalizada utilizando las bandas del Rojo e Infrarrojo
cercano.
▪ Cálculo de mapas de cambio continuo. Se aplicaron dos métodos de detección de
cambios, Diferencias entre los mapas del PC1 que consiste en una resta entre los
valores de PC1 de ambas fechas y, Regresión lineal que consiste en una regresión por
mínimos cuadrados y que permite obtener un mapa de residuales que representan la
magnitud del cambio sufrido en una zona entre dos momentos.
Pág. 52